Project Overview
Factories faced cost issues when training operators to operate Servo Systems on real machines. Novice operators required higher trial and error costs to experiment and familiarize themselves with the effects of different parameters. Also, factories were often located outside of urban areas, resulting in transportation costs for actual field training, which were one of the hidden costs.
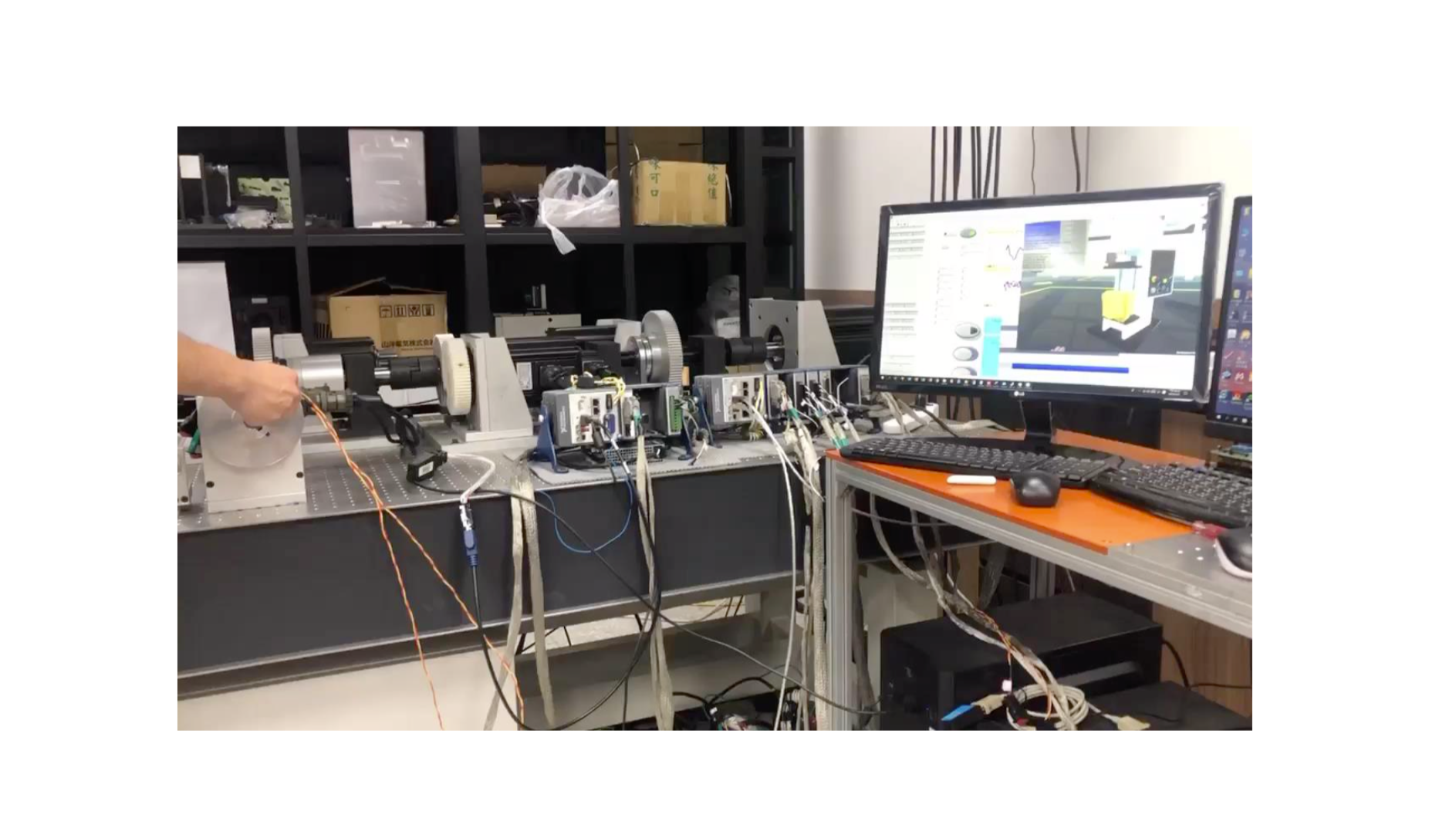
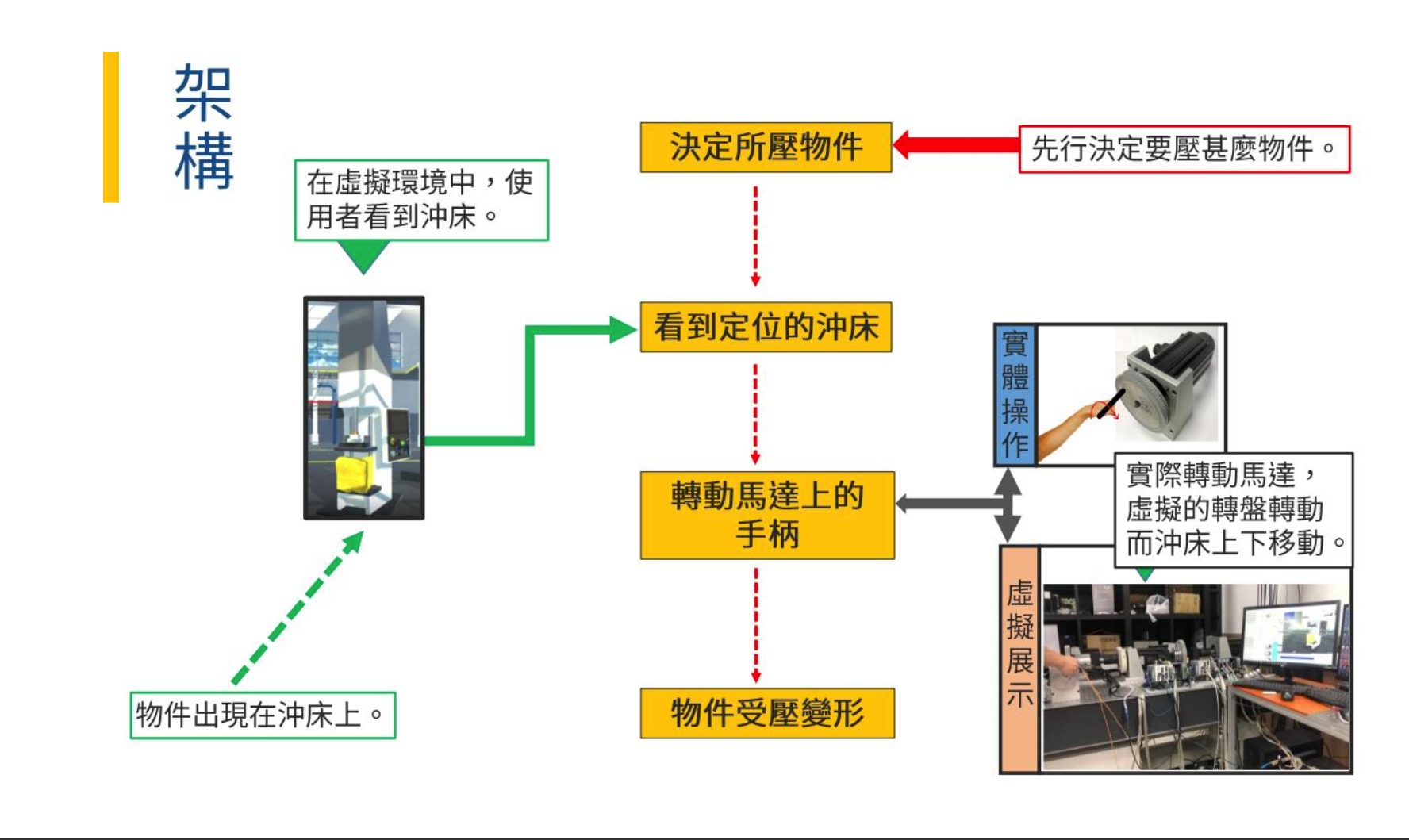
Therefore, in this industry-academia collaboration project between National Cheng Kung University and Delta Electronics, I collaborated with mechanical engineers to design a virtual reality system that combines software and hardware. This system allows operators and hardware engineers to learn and study motor systems in a precise and realistic way in a virtual environment. The system not only allows input of test data to observe results and try using the virtual reality machine but also provides immediate data output for the dual-axis control haptic feedback device in the real environment.
Additionally, in this learning system, we created an interesting user journey that allows learning the operation of Servo to balance both real and engaging experiences.
Thus, we proposed our solution "virtual factory", which is a novel system combining virtual reality with bilateral-control haptic feedback.
With our solution, users can easily simulate the operation process with a lower cost of time and error. We allow them to test machines with infographics and realistic haptic feedback. Also, our solution provides import/outport data functions to ensure a seamless experience with the desktop.
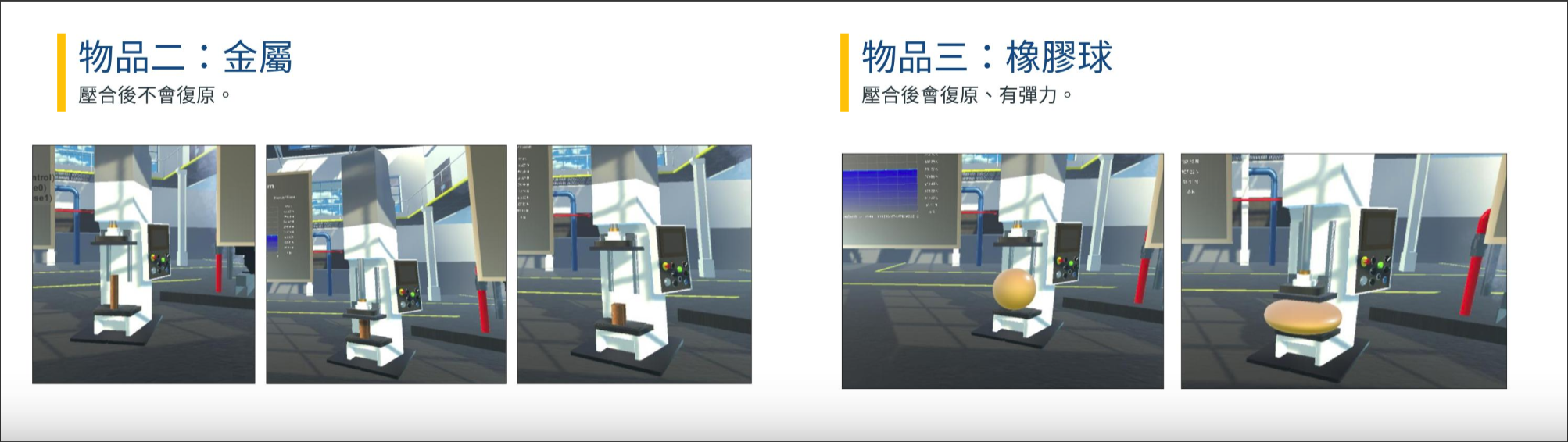
We didn't stop at the "must-have" function. Our solution provides many demo objects with different to enhance comprehension and create a delightful experience for the users.
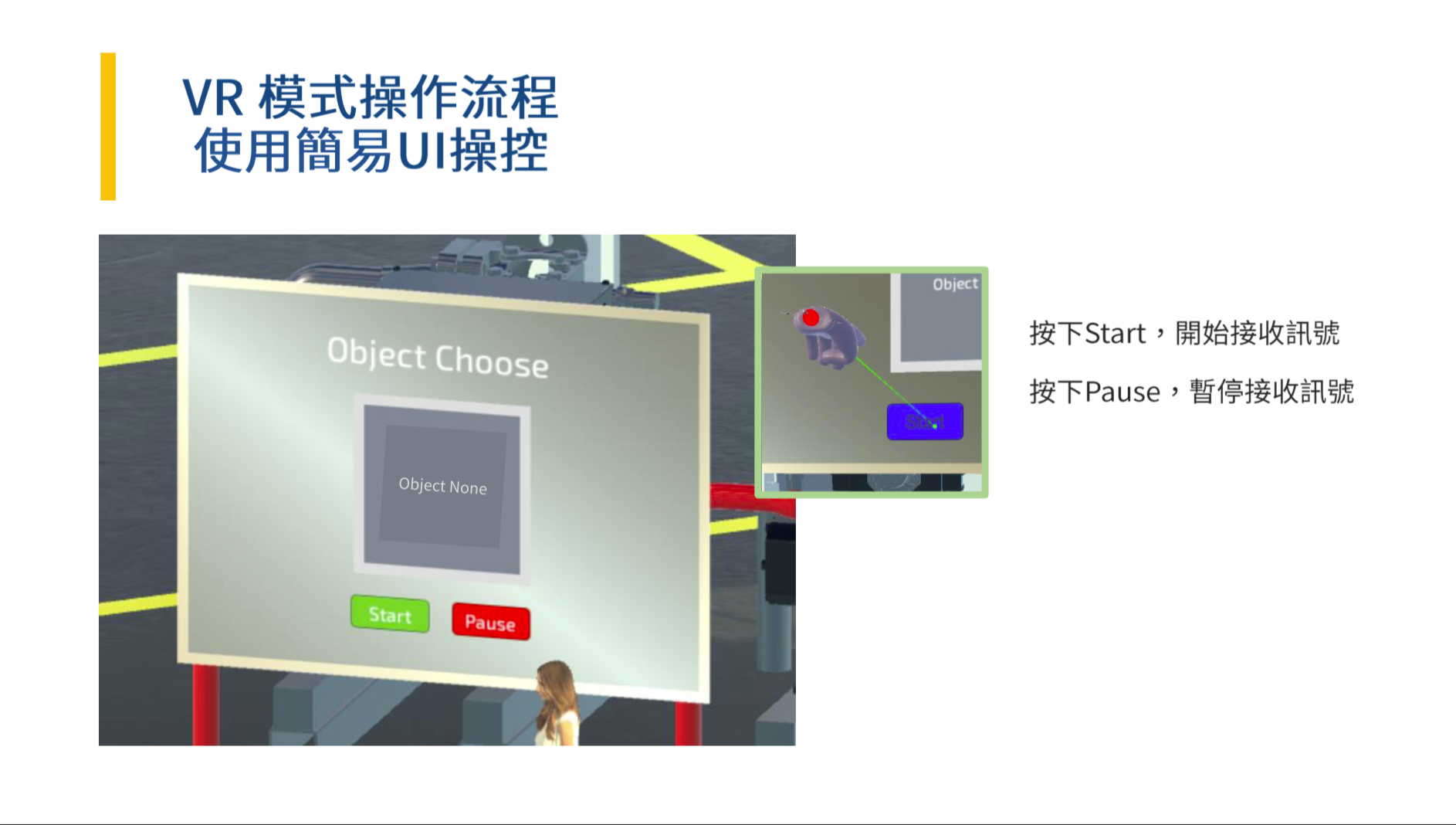
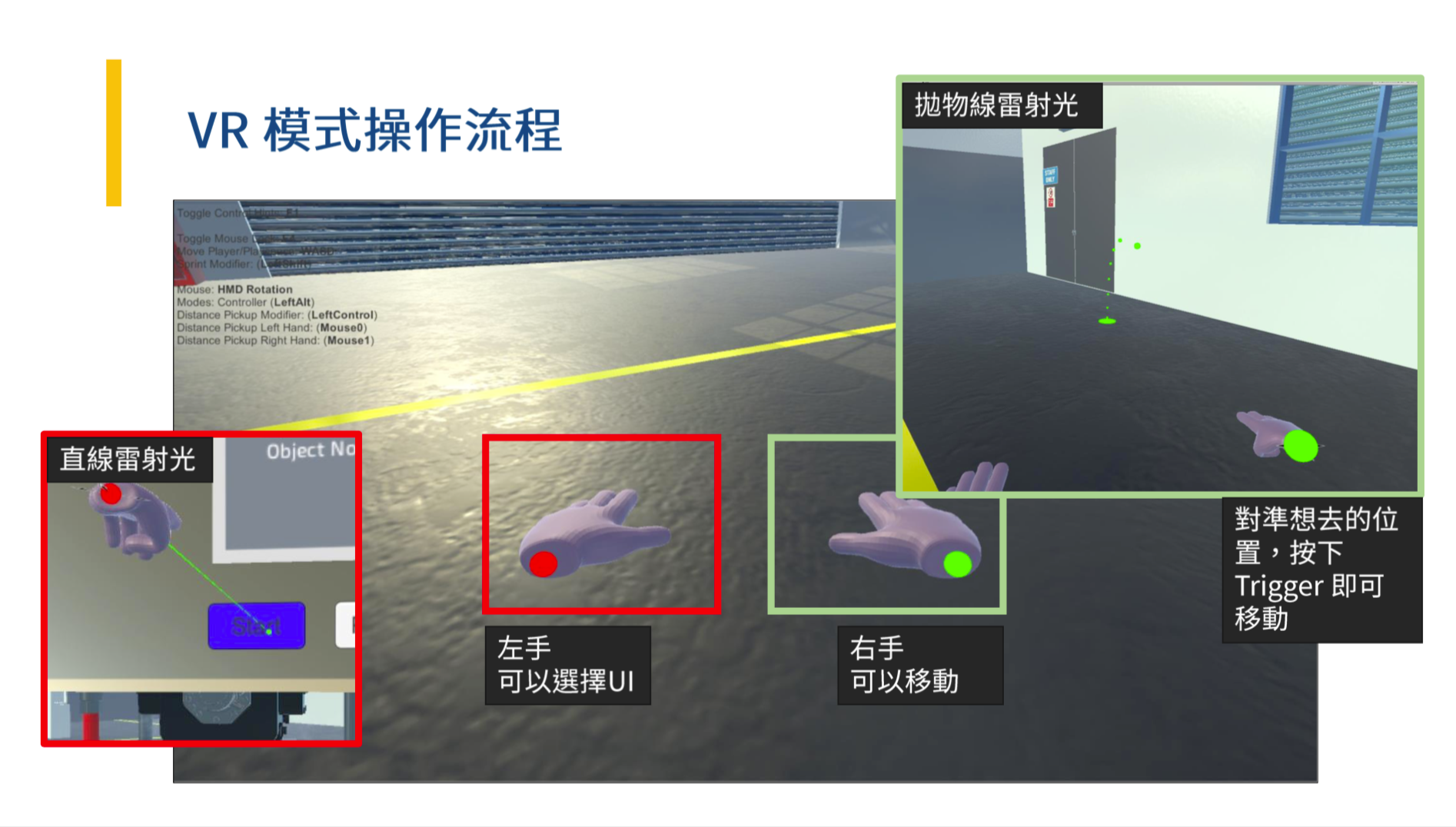
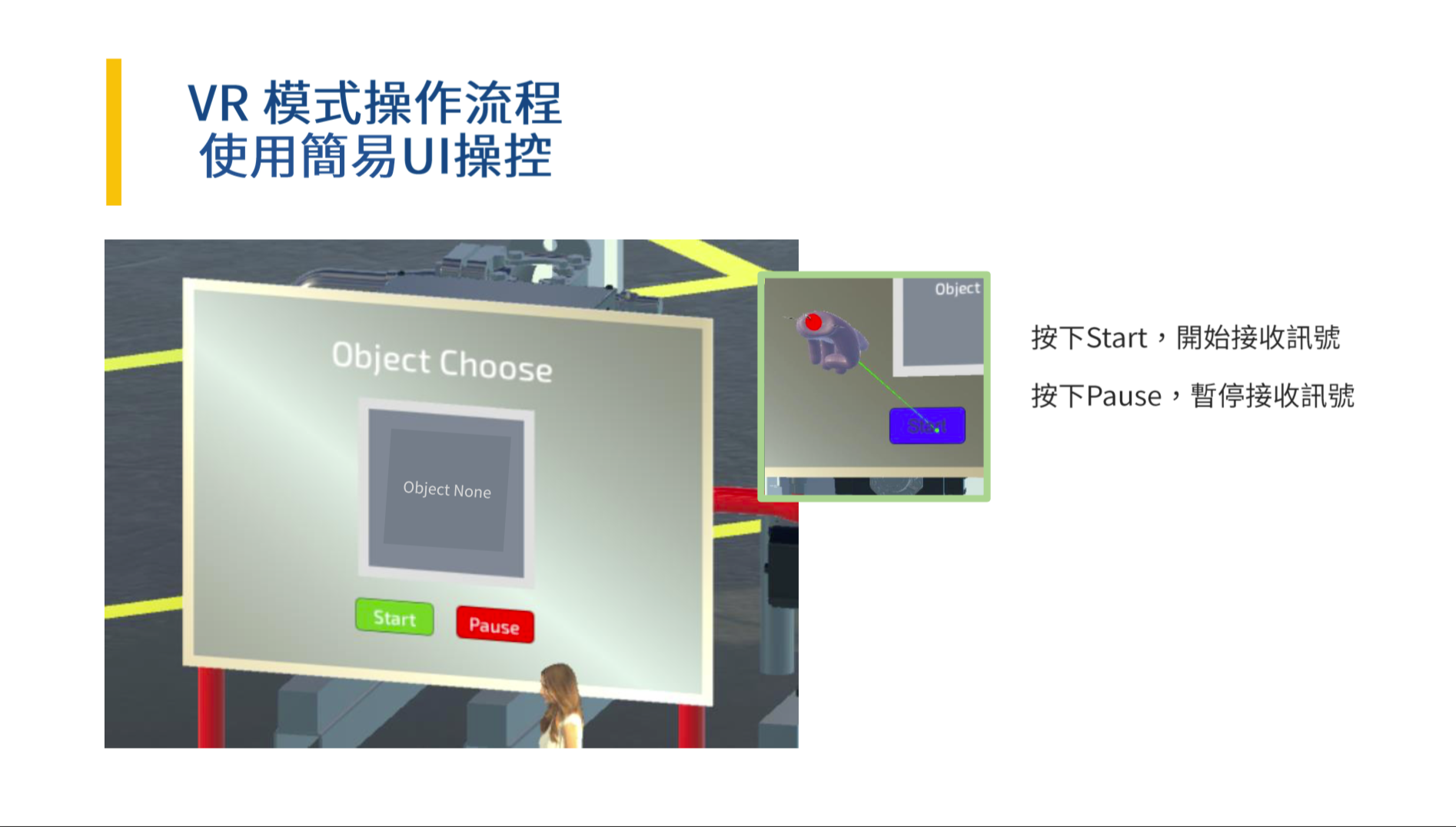
Also, we provide an intuitive human-computer interface for desktop and virtual reality.
Our solution is validated by expert interviews and end-users usability to ensure it can bring an easy and accurate experience.
If you are looking for a solution to save your time-consuming, hardware cost, physical space, and decrease the error rates of operating industry machines, "Virtual Factory" will be a powerful and delightful solution.
Design Process
01 Understand the problems/hardware limitation
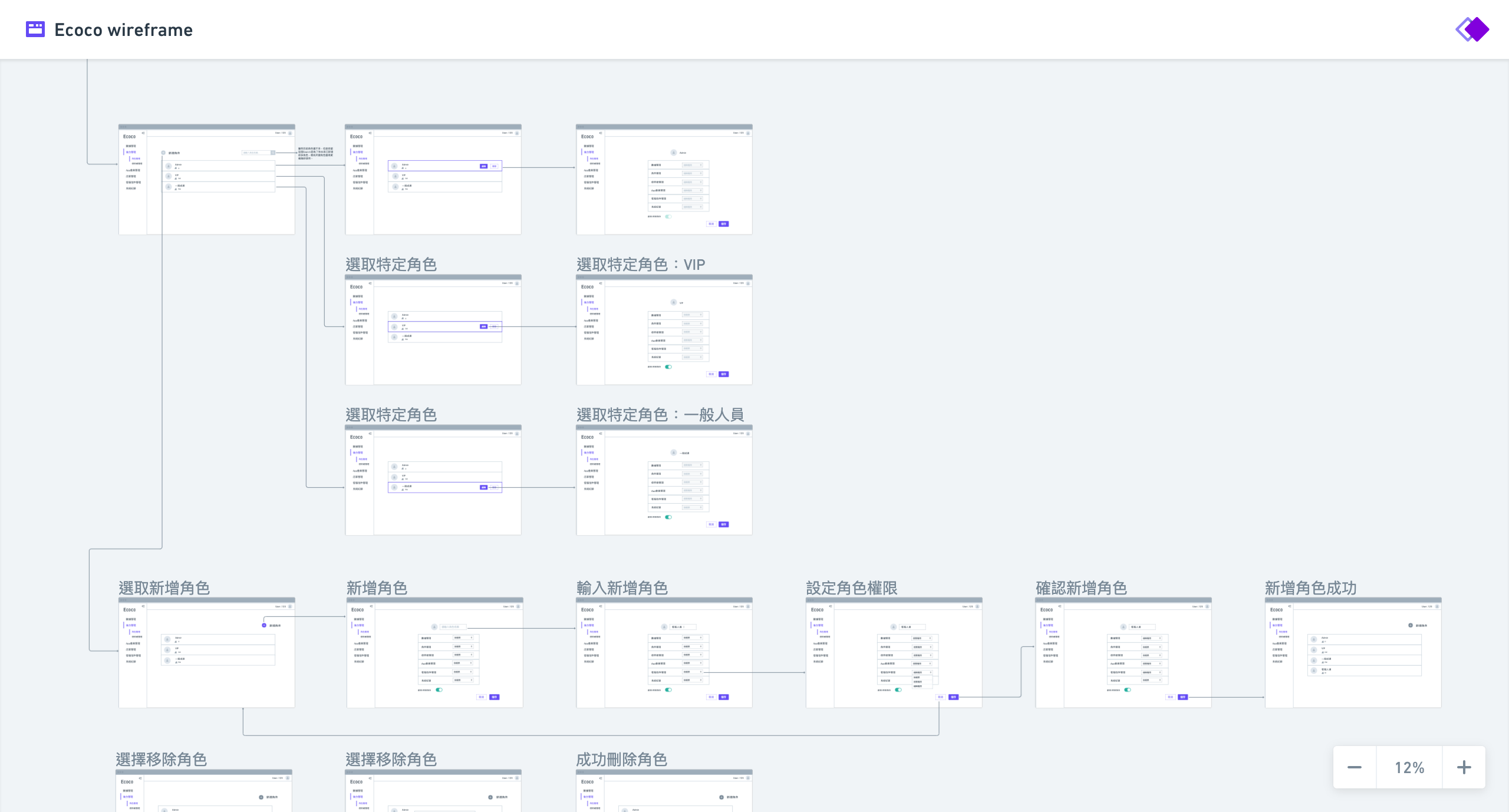
02 Wireframe
03 Ideate a solution
04 Validate with experts and end-users
- Observe the working environment of factory employees.
- Understanding the hardware limitation with hardware experts.
Discuss information structure with team. Discuss concepts with PM and Devs.
Ideate a solution and discuss with hardware engineers by using a simple prototype made with Adobe XD.
- Prototyping in Unity
- Experts interview to ensure the accuracy
- Usability Test with 5 users
Understand the problems/hardware limitation
What is the problems do the factory's owners faced in the industry?
Factories faced cost issues when training operators to operate Servo Systems on real machines. Novice operators required higher trial and error costs to experiment and familiarize themselves with the effects of different parameters. Also, factories were often located outside of urban areas, resulting in transportation costs for actual field training, which were one of the hidden costs.
What is bilateral control system?
Why it is important for the people who need to learn how to operate the machine?
This system adopts a control scheme called bilateral control, which combines the external torques from both the master and slave sides to improve the control system. The design also uses impedance control, which creates an impedance model to provide haptic feedback customized for specific environments.
Haptic feedback bilateral motion control is used in industrial applications to enhance human-machine interactions. This includes physical and virtual-cyber interactions where visual, auditory, and tactile information can improve human operation. While visual and auditory feedback is easily presented to operators, feeling physical haptic feedback can be challenging, especially when the experience needs more accuracy. Most human-machine interaction systems use vibration for force/torque feedback rather than haptic feedback, but haptic feedback can significantly enhance the interaction experience based on bilateral motion control.
Our solution can provides a realistic experience for professional training in the industry.
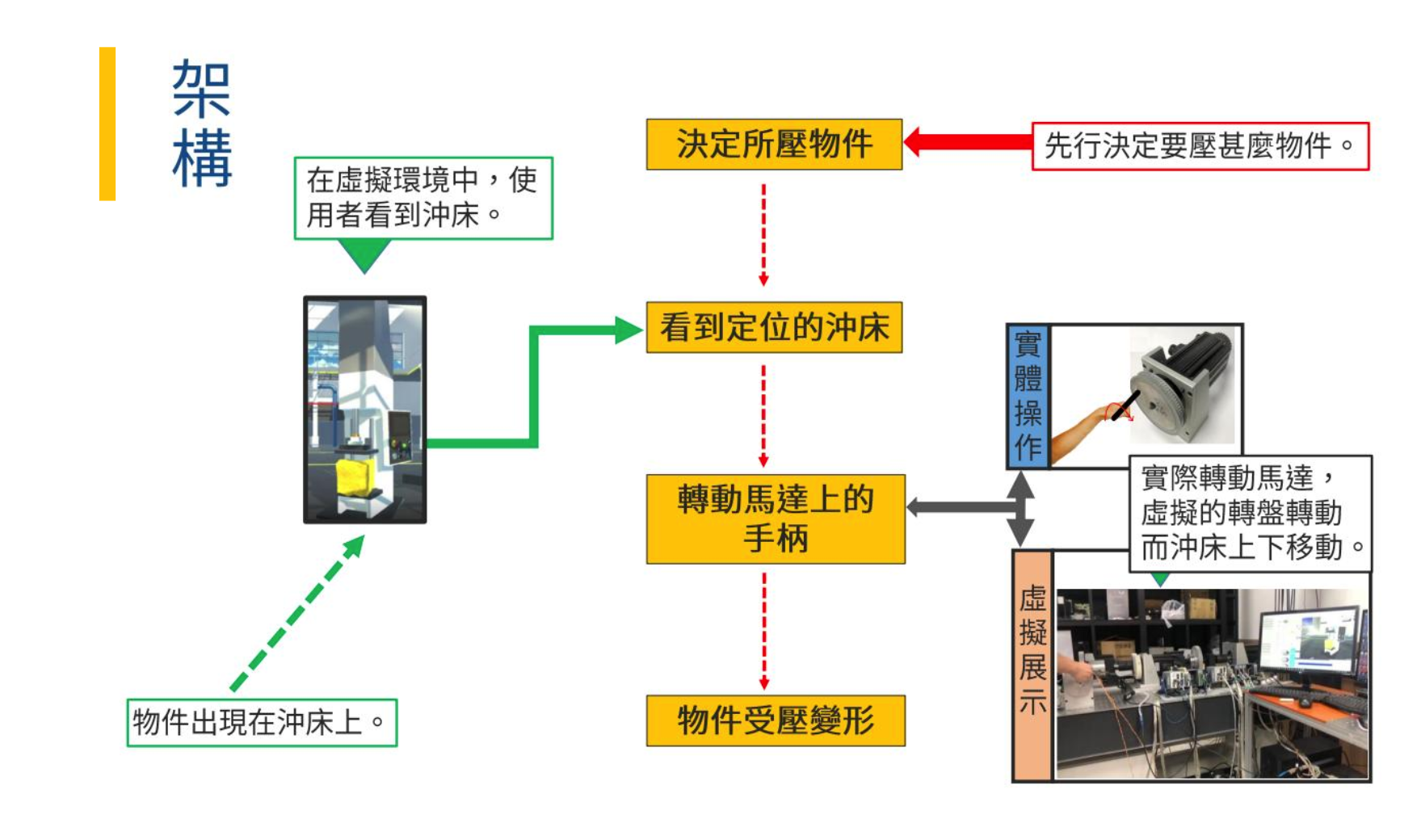
System Infrastructure
Ideation
Insight 1:
Ensure a seamless experience between desktop and VR.
We provide an intuitive human-computer interface for desktop and virtual reality.
During the user interview, we understand that users need to create a report while they finish the testing in the real-world factory. When something gets wrong, they also need to check the .csv file to look into the data. Although we create a clear and easy-to-read infographic in VR mode, it is quite inconvenient for them to utilize the data to do the daily process.
Eventually, we make a decision to spend time optimizing the seamless experience between desktop mode and VR mode.
Insight 2:
Facilitating users with the nice-to-have features.
In the virtual reality world, we can create anything in our imagination with simple 3D models. Despite the low cost, many cool demo stuff and some special effects do create a delightful user journey while the end-users are learning something routine and repetitive.
As a result, we didn't stop at the "must-have" function. Our solution provides many demo objects with different textures to enhance comprehension and create a delightful experience for the users to enhance their learning.